Ooga Booga & Frank
Ooga Booga and Frank were the VEXU robots that my team built for Change Up.
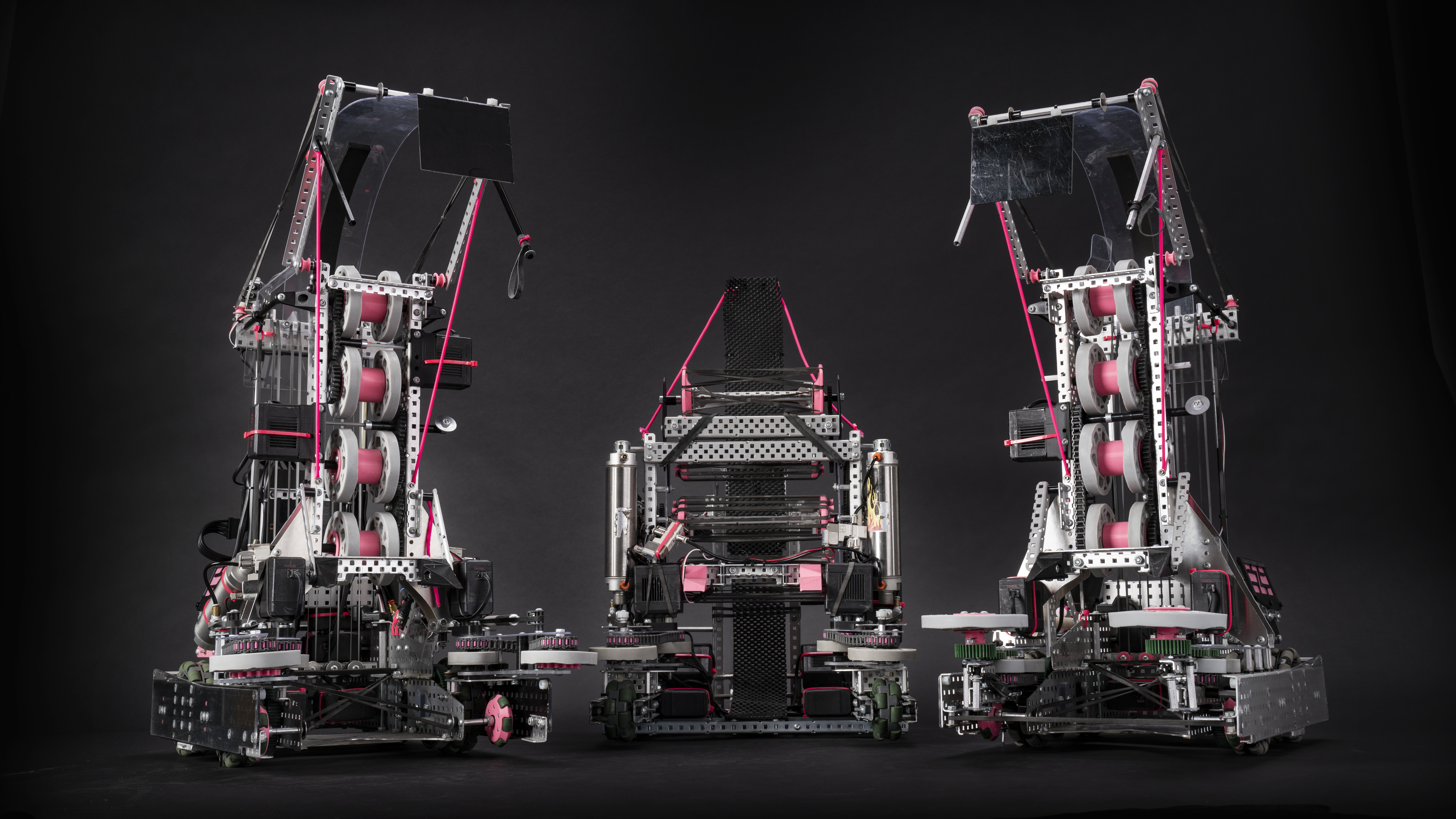
Ooga Booga
Ooga and Booga were tether bots that were connected by a 13ft wire. Together they fit in size constraints as 1 robot, and because they are connected they are considered 1 robot.

Ooga
This was the main robot that had the brain. Ooga had 10 motors. 6 drive, 2 intake, 2 conveyor. The intake pneumatically closed for taking balls out of the goals.

Booga
This was the puppet robot. Booga had 7 motors. 4 drive, 2 intake, and 1 conveyor.
The intake on Booga is different from Ooga or Frank, where Booga had larger wheels. These wheels helped increase the intake range of the robot by flexing out the way. The larger wheel meant if we hit a wall the intake would stop spinning, we solved this by putting the wheel on a 3D-printed slip clutch.
The conveyor had only 1 motor but needed 2 functions: holding onto balls and scoring. This was accomplished with ratchets. Inside the conveyor wheels are pawls and the gears all have ratchets on them. When the motor goes in one direction, only the bottom roller spins up. When the motor goes in the opposite direction, all of the rollers spin up. The bottom wheel goes the same way regardless of the input because of inverted ratchets on each side, similar to this video.
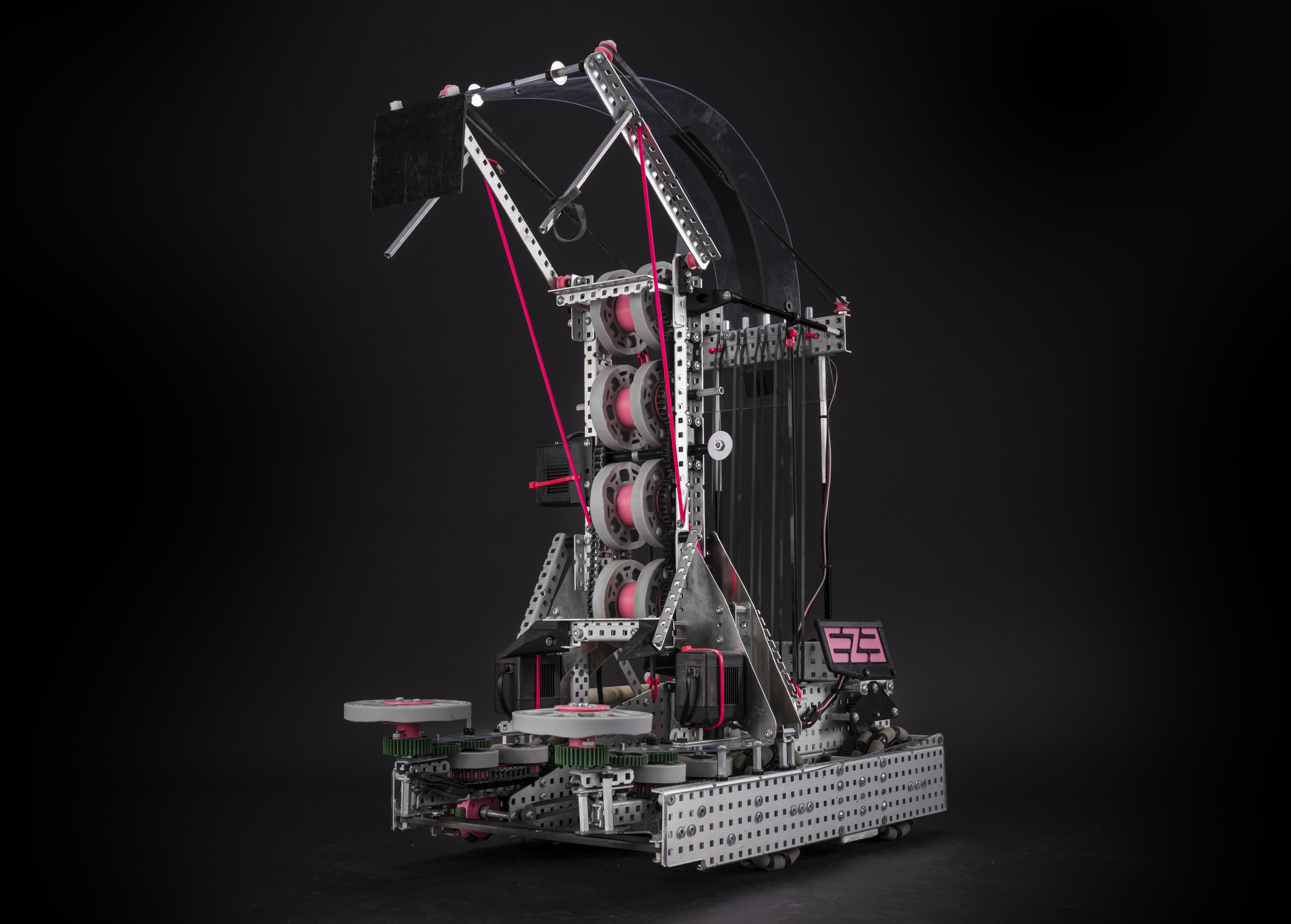
Frank
Frank was a smaller 15" robot. Frank had 11 motors. 6 drive, 2 on the intake, and 3 on the conveyor.
The intake on Frank was almost identical to Ooga. Pneumatically actuated for removing balls from goals.
For the conveyor, Frank used rubber band rollers instead of urethane wheels. The concept of both is the same, but on Frank, we used a harder back material and squishy rollers.
The center traction wheel on Frank was 3d printed, and we molded polyurethane around it.
